
基於動態視窗演算法的機器人自主導航及噴灑系統
產品型號:113144741
產品分類:數位轉型與系統整合
廠商名稱:國立成功大學
攤位號碼:N008
產品特色
本作品提出一種基於動態視窗演算法的機器人自主導航系統及方法,從深度影像中辨識環境中的多個物件,依據這些物件的間距產生多個聚類,再計算機器人與這些聚類之間的多個距離,選擇小於指定距離的至少一聚類計算出噴灑路徑,之後透過光學雷達取得環境的感測資料,及運算裝置依據感測資料產生成本地圖,並執行動態視窗演算法產生多個候選軌跡,最後綜合上述噴灑路徑、成本地圖及所述多個候選軌跡至目標函數中計算出最佳軌跡,可同時兼具導航、噴灑、避障等功能,可運用於果園中巡航與自動噴灑。
相關產品
-
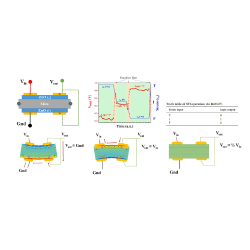
多維度應變感測裝置、藉由其的外部作用類型的感測方法以及三元值邏輯裝置的形成方法以及三元值邏輯系統
-
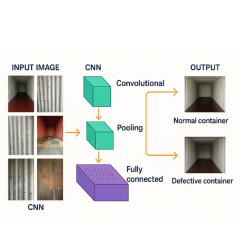
應用機器學習進行海運貨櫃缺陷之自動偵測
-
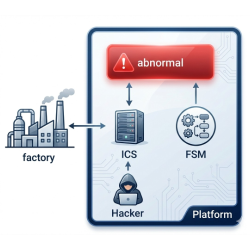
查詢式系統異常偵測技術
-
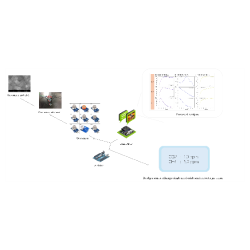
以物理 AI 實現單一金屬氧化氣體感測器的多氣體分辨技術
-

國立成功大學AI Service Center
您可能有興趣的產品
-

-低頻高阻尼光學隔振平台
-

RFID SupraTag
-

超大扭矩伺服馬達
-

單手安全單閉快速接頭
-
Rockchip 高性價比, 四核A35應用處理器==> 單板電腦SBC3300
-

8-271萬向旋轉吊環
-

u-APS 智慧生產排程系統
-
μCatch 數位螢幕顯微鏡
-
大中空精密旋轉平台
-

雙片喫入式接頭
-
SupraNano
-

8-231起重旋轉吊環
-

USB Microscope 數位顯微鏡
-
空氣軸承模組
-

省力快插調速閥
-

VueCatch 數位螢幕顯微鏡
-

超高精度傳動模組
-

3次元超音波風向風速計
-

微型單手快速接頭
-

DynaVue 數位螢幕倍率放大鏡
-

XYZ微型線馬平台
-

u-Planning 智慧生產計畫
-

u-Optimizer 最佳生產排程
-

8-291K眼型旋轉吊環
-
16K 高解析度線掃相機+自動對焦模組
人氣產品專區
-

TG-ASD50AB 導熱凝膠
-
軟性電路板
-
TG-PCM095 相變化材料
-

TG-AD66 超軟導熱矽膠片
-

微米級智慧噴霧乾燥機
-

智慧製造戰情中心
-
空氣軸承模組
-
超高精度傳動模組
-
XY中空定位平台
-
精密升降平台
-
XY共面氣浮平台
-
XYZ微型線馬平台
-
大中空精密旋轉平台
-

智慧引擎系列
-
金色子彈系列
-

玉衡系列
-

天樞系列
-

天權/天權-近紅外系列
-
天璣 / 天璣-近紅外系列
-

鷹眼系列
-

響尾蛇系列
-
紅色子彈系列
-
銀色子彈系列
-
8-291K眼型旋轉吊環
-
8-271萬向旋轉吊環
-

8-211側向旋轉吊環
-
RFID SupraTag
-
8-231起重旋轉吊環
-

具有高抗衝擊保護玻璃的新型智能觸控電腦 => NSD3500-HL-KK3
-

高亮智能觸控電腦 NSD2500-HL



